


#detail_decorate_root .magic-0{width:750px}#detail_decorate_root .magic-1{overflow:hidden;width:750px;height:54px;margin-top:0;margin-bottom:0;margin-left:0;margin-right:0}#detail_decorate_root .magic-2{margin-top:0;margin-left:0;width:750px;height:54px}#detail_decorate_root .magic-3{text-align:center}#detail_decorate_root .magic-4{font-size:20px}#detail_decorate_root .magic-5{vertical-align:top}#detail_decorate_root .magic-6{vertical-align:top;display:block;padding-right:4px;box-sizing:border-box;padding-left:4px}#detail_decorate_root .magic-7{vertical-align:top;padding-bottom:4px;box-sizing:border-box;padding-top:4px}#detail_decorate_root .magic-8{padding:0;margin:0;white-space:pre-wrap;font-size:14px}#detail_decorate_root .magic-9{overflow:hidden;width:750px;height:422.5px;margin-top:0;margin-bottom:0;margin-left:0;margin-right:0}#detail_decorate_root .magic-10{margin-top:0;margin-left:0;width:750px;height:422.5px}#detail_decorate_root .magic-11{width:750px;border-collapse:collapse}#detail_decorate_root .magic-12{min-height:28px;padding:5px 10px;width:167px;min-height:28px;box-sizing:content-box}#detail_decorate_root .magic-13{min-height:28px;padding:5px 10px;width:540px;min-height:28px;box-sizing:content-box}#detail_decorate_root .magic-14{overflow:hidden;width:750px;height:1060.6106408706166px;margin-top:0;margin-bottom:0;margin-left:0;margin-right:0}#detail_decorate_root .magic-15{margin-top:0;margin-left:0;width:750px;height:1060.6106408706166px}#detail_decorate_root .magic-16{overflow:hidden;width:750px;height:900.9975816203143px;margin-top:0;margin-bottom:0;margin-left:0;margin-right:0}#detail_decorate_root .magic-17{margin-top:0;margin-left:0;width:750px;height:900.9975816203143px}#detail_decorate_root .magic-18{margin-bottom:10px;line-height:0}#detail_decorate_root .magic-19{margin-bottom:0}#detail_decorate_root .magic-20{position:relative;width:100%}#detail_decorate_root .magic-21{overflow:hidden;width:373px;height:460.4938271604938px;margin-top:0;margin-bottom:0;margin-left:0;margin-right:0}#detail_decorate_root .magic-22{margin-top:0;margin-left:0;width:373px;height:460.4938271604938px}#detail_decorate_root .magic-23{overflow:hidden;width:373px;height:460px;margin-top:0;margin-bottom:0;margin-left:4px;margin-right:0}#detail_decorate_root .magic-24{margin-top:3px;margin-left:5px;width:361px;height:553px}#detail_decorate_root .magic-25{overflow:hidden;width:750px;height:171.75px;margin-top:0;margin-bottom:0;margin-left:0;margin-right:0}#detail_decorate_root .magic-26{margin-top:0;margin-left:0;width:750px;height:171.75px}#detail_decorate_root .magic-27{overflow:hidden;width:750px;height:500px;margin-top:0;margin-bottom:0;margin-left:0;margin-right:0}#detail_decorate_root .magic-28{margin-top:0;margin-left:0;width:750px;height:500px}#detail_decorate_root .magic-29{overflow:hidden;width:750px;height:183px;margin-top:0;margin-bottom:0;margin-left:0;margin-right:0}#detail_decorate_root .magic-30{margin-top:0;margin-left:0;width:750px;height:183px}#detail_decorate_root .magic-31{overflow:hidden;width:750px;height:489px;margin-top:0;margin-bottom:0;margin-left:0;margin-right:0}#detail_decorate_root .magic-32{margin-top:0;margin-left:0;width:750px;height:489px}






Robot esoscheletrici FIT-GS-ProLimero
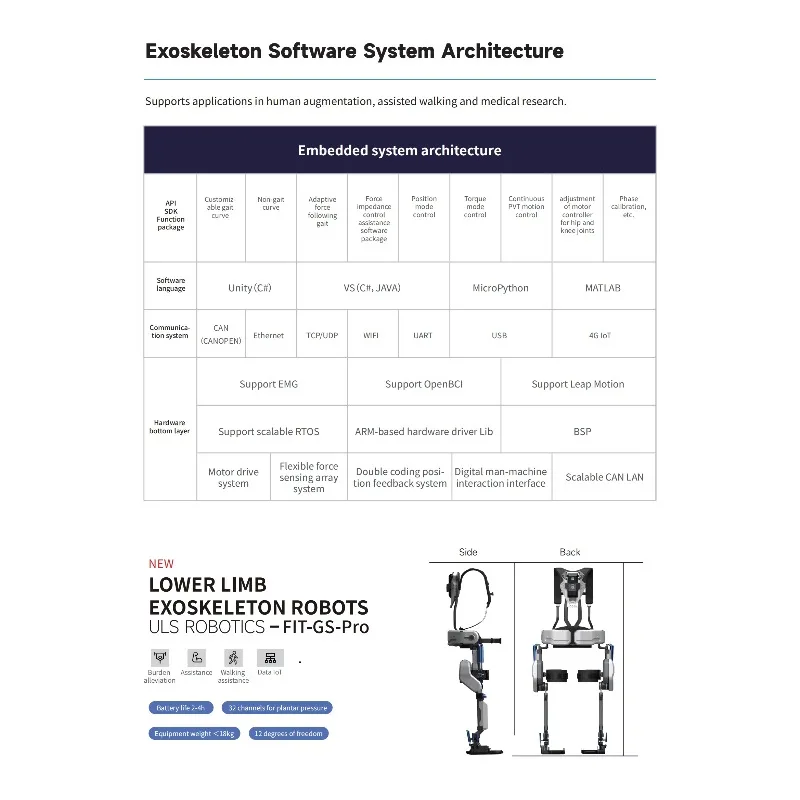
Il FIT – GS – Pro è dotato di un driver digitale intelligente in modo indipendente.Questa tecnologia all’avanguardia consente a
integrazione perfetta del sistema di decelerazione lar del modulo integrato e del sistema di controllo del movimento intelligente adattivo.Utilizzando impedenza meccanica basata su software e algoritmi di marcia adattiva di autoapprendimento e completati da
Tecniche di controllo del movimento e riconoscimento dei modelli alimentate dall’intelligenza artificiale, il robot può adattarsi rapidamente a un’ampia gamma di scenari di movimento complessi, soddisfacendo così diversi requisiti di sviluppo.
integrazione perfetta del sistema di decelerazione lar del modulo integrato e del sistema di controllo del movimento intelligente adattivo.Utilizzando impedenza meccanica basata su software e algoritmi di marcia adattiva di autoapprendimento e completati da
Tecniche di controllo del movimento e riconoscimento dei modelli alimentate dall’intelligenza artificiale, il robot può adattarsi rapidamente a un’ampia gamma di scenari di movimento complessi, soddisfacendo così diversi requisiti di sviluppo.
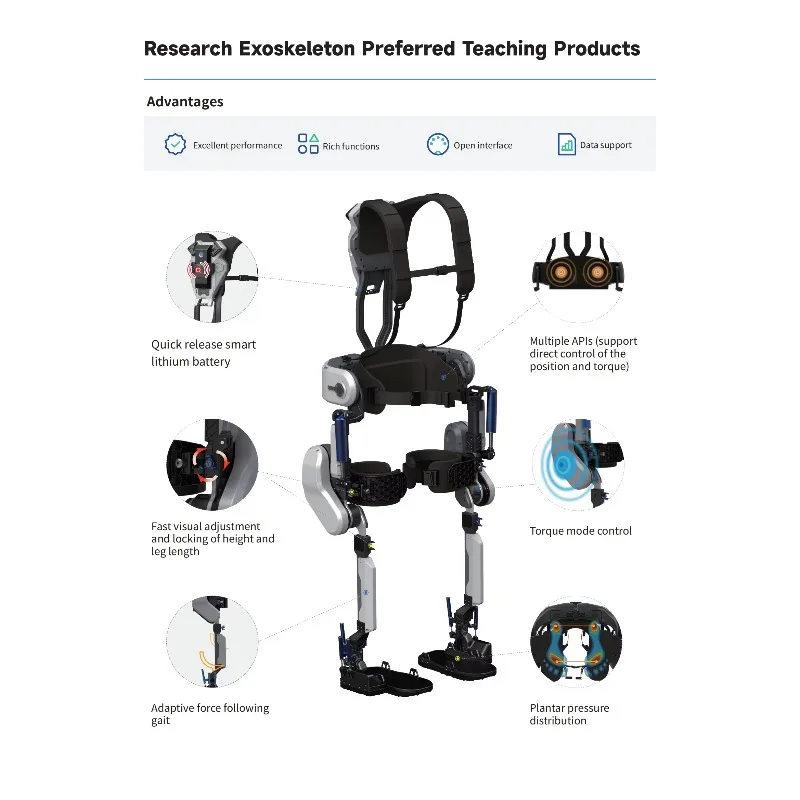
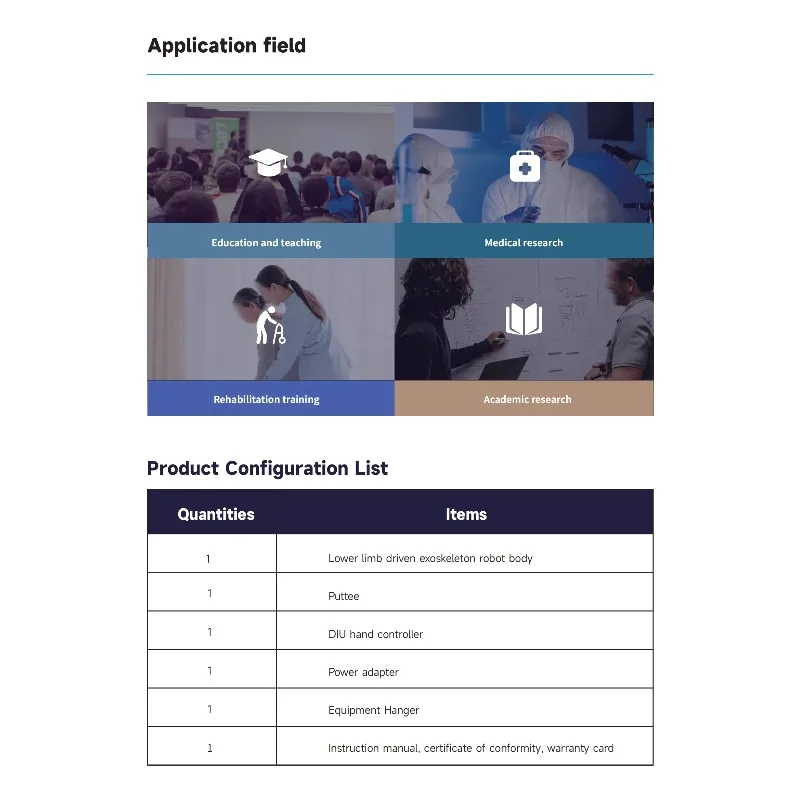
Specificamente progettato per università, istituti di ricerca ed enti di ricerca medica, offre una forma piatta personalizzata per lo sviluppo secondario e la ricerca in profondità.

Dimensioni del dispositivo |
542x411x1385(mm) (L×LxA) |
Dimensioni del controllo manuale |
102×71×35(mm) (L×L×A) |
Peso del dispositivo |
Il peso del dispositivo < 18 kg, inclusa 1 batteria di alimentazione |
Fonte di alimentazione |
Azionamento elettrico |
altezza |
160~185 cm (supporta la regolazione dell’altezza) |
Temperatura ambiente |
-20鈩儈50鈩� |
Resistenza |
La batteria al litio è sottoposta a una struttura rimovibile e sostitutiva e una singola batteria dura 4~6 ore/batteria |
batteria |
Batteria al litio 36V |
grado di libertà |
Anologia di libertà a 12 gradi, inclusi 4 gradi attivi di libertà e 8 gradi passivi di libertà |
Materiale |
Materie plastiche tecniche, leghe di alluminio aeronautico, fibre di carbonio |
Software |
software di controllo del movimento, software di sistema integrato, software di sistema di bus discreto in tempo reale |
Pressione plantare |
Supporto dati sulla pressione plantare a 32 canali |
Unità di trasmissione |
Sistema servomotore a coppia a bassa tensione integrato di azionamento e controllo, riduttore integrato |











Recensioni
Ancora non ci sono recensioni.