



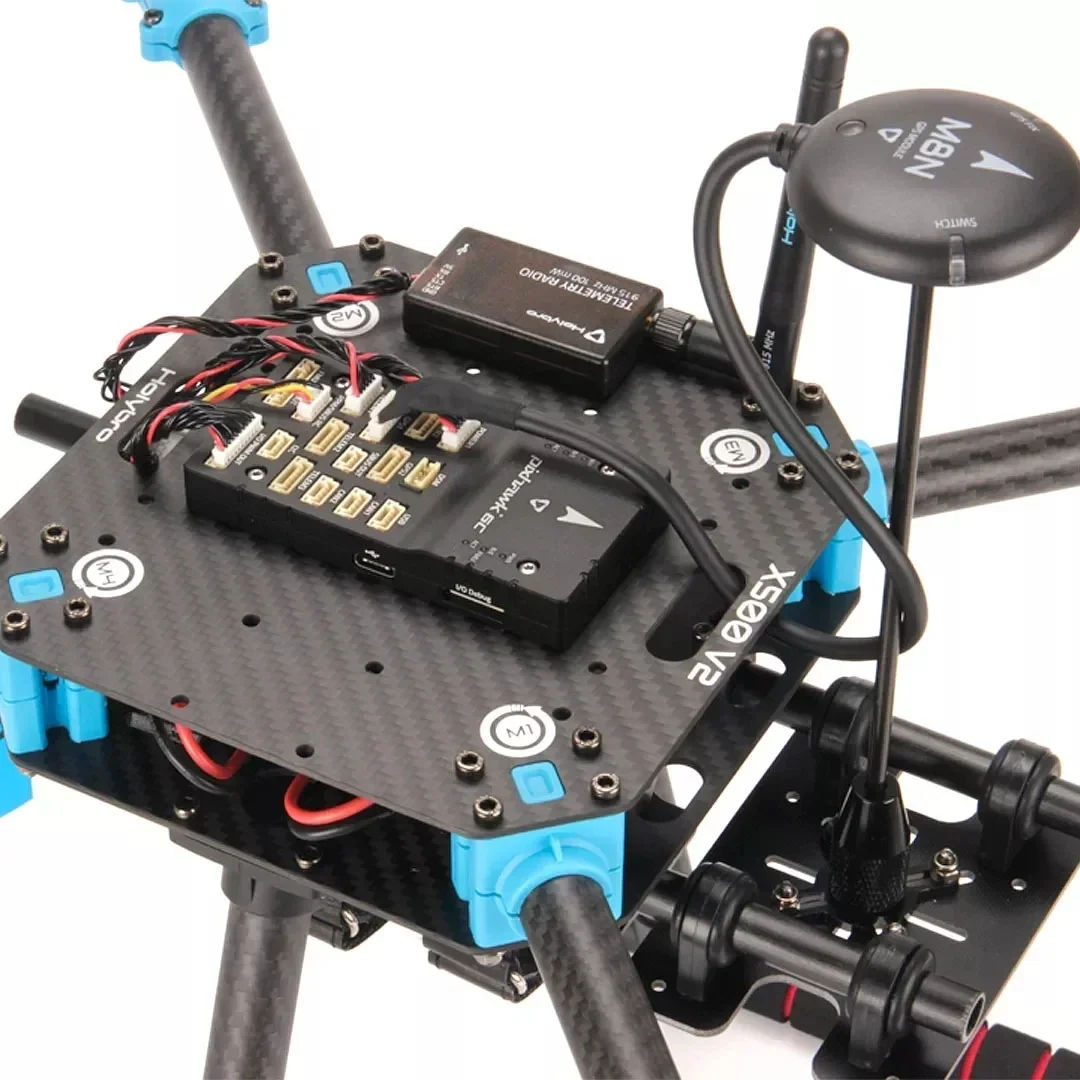

Kit di Sviluppo PX4 – X500 v2 È un kit di sviluppo professionale per droni in fibra di carbonio, conveniente, leggero e robusto, dotato del più recente controller di volo Holybro Pixhawk 6Core/Pixhawk 6X Autopilot, GPS M10 e radio telemetrica SiK plug & play.È facile e veloce da assemblare (~30 minuti) senza bisogno di saldature, così puoi dedicare più tempo al volo e allo sviluppo.Viene fornito con il kit telaio X500 V2 e motori, ESC, schede di distribuzione dell’alimentazione ed eliche extra.I bracci del drone sono preinstallati con motori ed ESC in modo che possano essere collegati direttamente alla scheda di distribuzione dell’alimentazione senza la necessità di saldature.
Il TelaioX500 versione 2È realizzato in twill di fibra di carbonio integrale, con bracci tubolari in fibra di carbonio supportati da connettori in nylon rinforzato con fibra di nuova concezione, dotati di pratiche scanalature su entrambi i lati, motore e corpo, per un’installazione molto più semplice e diretta.Il carrello di atterraggio è composto da tubi in fibra di carbonio con diametro di 16 mm e 10 mm, dotati di connettori rinforzati e ispessiti.
La scheda della piattaforma ora dispone di fori di montaggio per GPS e computer compagni più diffusi come Raspberry Pi 4 e Jetson Nano.È disponibile un supporto opzionale per fotocamera di profondità (acquistabile separatamente) per varie fotocamere di profondità come la serie Intel RealSense e le fotocamere di profondità Structure Core.La spaziatura tra le piastre in fibra di carbonio superiore e inferiore è stata aumentata per fornire un accesso più facile.La scheda di montaggio della batteria regolabile è stata ingrandita per supportare batterie più grandi per un tempo di volo più lungo.Il sistema di montaggio su guida è pronto per accogliere un’ampia gamma di supporti per fotocamere e gimbal per diverse applicazioni.Tutti gli strumenti per l’installazione sono forniti nella confezione.
Nota: Il controller di volo Pixhawk 6C è compatibile sia con PX4 che con Ardupilot, ma viene fornito con il firmware Autopilot open source PX4.
Caratteristica:
Nuovo Flight Controller Pixhawk 6Core/Pixhawk 6X con modulo M10GPS e radio telemetrica SiK Plug & Play.
Nuovo design del telaio con tempi di assemblaggio minimi (~30 minuti), nessuna saldatura richiesta
Telaio in fibra di carbonio con connettori in nylon rinforzato con fibra che garantiscono un’installazione semplice e diretta
Motori ed ESC preinstallati con semplici connettori di alimentazione XT30 per PDB
Scheda di distribuzione dell’alimentazione (PDB) con connettori XT60 e XT30
Supporto per computer di bordo come Raspberry Pi e Nvidia Jetson Nano
Supporto opzionale per fotocamera di profondità per Intel RealSense e Structure Core
Nota:
La versione Pixhawk 6X ora viene fornita conPM02D – Alta TensioneVersione (alta tensione).In PX4, è necessario impostare SENS_EN_INA228 per abilitare questo.Questa versione HV è supportata solo in Ardupilot 4.4 e versioni successive.
Supporto firmware per GPS M10: È richiesta la versione 1.14 di PX4 e ArduPilot 4.3 o successiva.
Kit di Sviluppo PX4 – X500 v2 Include:
Controllore di volo Autopilot: Pixhawk 6C (Custodia in plastica) e PM02 V3 Pixhawk 6X (Base Standard) & PM02D-6S
Modulo GPS M10
SiK Telemetry Radio V3 433/915MHz
Kit telaio X500 V2
- Elementi preinstallati:
Motori – Motore Holybro 2216 KV920 (4 pezzi) con connettore XT30 (le specifiche del motore sono disponibili qui)
ESC – BLHeli S ESC 20A (4 pezzi) con connettori XT30 – Compatibile con batteria 4S
1045 Eliche (6 pz)
Scheda di Distribuzione dell’Energia (con connettore XT60 per batteria e connettore XT30 per ESC e periferiche)
Dettagli del Kit Telaio X500 V2:
Corpo – Piastra superiore e inferiore interamente in fibra di carbonio (144 x 144 mm, spessore 2 mm)
Braccio – Tubi in fibra di carbonio da 16 mm ad alta resistenza e ultraleggeri con connettori in nylon rinforzato con fibra di nuova concezione
Carrello di atterraggio: tubi in fibra di carbonio da 16 mm e 10 mm di diametro con connettori a T in plastica rinforzati e migliorati.
Scheda piattaforma – Con fori di montaggio per GPS e computer di navigazione più diffusi come Raspberry Pi 4 e Jetson Nano.
Sistema di montaggio su guida con doppia asta Ø 10 mm x 250 mm di lunghezza
Supporto per batteria con due cinghie di fissaggio.
Utensili manuali per l’installazione
Specifiche Meccaniche:
Passo: 500 mm
Schema di montaggio del motore: 16×16 mm
Corpo del telaio: 144×144 mm, spessore 2 mm
Altezza del carrello di atterraggio: 215 mm
Distanza tra la piastra superiore e quella inferiore: 28 mm
Peso: 610 g
Tempo di volo: ~18 minuti in hovering senza carico aggiuntivo.Testato con batteria da 5000 mAh.
Carico massimo: ~1kg (con batteria 4S 5000 mAh @70% dell’acceleratore)
Raccomandazione per la batteria: 4S 3000-5000mAh 20C+ con batteria Lipo XT60 (non inclusa)














Recensioni
Ancora non ci sono recensioni.