


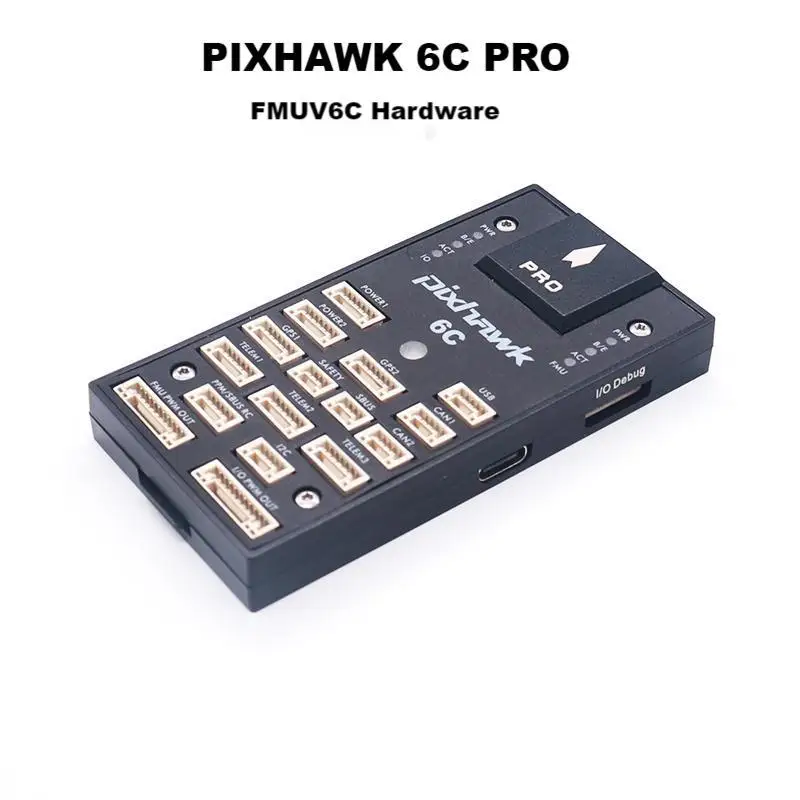
PIXHAWK 6C PRO
Il Pixhawk® 6C PRO è l’ultimo aggiornamento per la famiglia di successo di Pixhawk® controllori di volo, basati sul Pixhawk® FMUv6C Standard aperto e standard connettore.Viene fornito con pilota automatico PX4® preinstallato.STMicroelettronica® basato su STM32H743, abbinato alla tecnologia dei sensori di Bosch® & InvenSense®, offrendo flessibilità e affidabilità per il controllo di qualsiasi veicolo autonomo, adatto sia per applicazioni accademiche che commerciali.
Il Pixhawk® Il microcontrollore H7 di 6C PRO contiene il braccio® Cortex®-Il core M7 funziona fino a 480 MHz, ha 2 MB di memoria flash e 1 MB di RAM.Grazie alla potenza di elaborazione aggiornata, gli sviluppatori possono essere più produttivi ed efficienti con il loro lavoro di sviluppo, consentendo algoritmi e modelli complessi.
Il Pixhawk 6C PRO include IMU ad alte prestazioni e silenziose a bordo, progettati per essere convenienti pur avendo ridondanza IMU.Un sistema di isolamento delle vibrazioni per filtrare le vibrazioni ad alta frequenza e ridurre il rumore per garantire letture accurate, consentendo ai veicoli di raggiungere prestazioni di volo complessive migliori.
Il Pixhawk® 6C PRO è perfetto per gli sviluppatori di laboratori di ricerca aziendali, startup, accademici (ricerca, professori, studenti) e applicazioni commerciali.
Punti chiave di progettazione
Processore STM32H743 ad alte prestazioni con maggiore potenza di calcolo e RAM
Cicalino incorporato, LED RGB integrato, supporto pulsante di sicurezza esterno indipendente, con custodia in plastica
Nuovo design conveniente con fattore di forma a basso profilo
Sistema di isolamento delle vibrazioni integrato di nuova concezione per filtrare le vibrazioni ad alta frequenza e ridurre il rumore per garantire letture accurate
Le IMU sono controllate dalla temperatura da resistori di riscaldamento integrati, consentendo una temperatura di funzionamento ottimale delle IMU
Specifiche tecniche
Processori e sensori
Processore FMU: STM32H743
Braccio a 32 bit® Cortex®-M7, 480 MHz, memoria 2 MB, SRAM 1 MBProcessore IO: STM32F103
Braccio a 32 bit® Cortex®-M3, 72 MHz, 64 KB SRAM
Sensori di bordo
Accel/Gyro: ICM-42688-P
Accel/Gyro: BMI055
Mag: IST8310
Barometro: MS5611
Dati elettrici
Valutazioni di tensione:
Tensione di ingresso massima: 6 V
Ingresso alimentazione USB: 4,75 ~ 5,25 V
Ingresso servo binario: 0~36 V
Valutazioni attuali:
Limitatore di corrente di uscita massimo TELEM1: 1,5 A
Limitatore di corrente di uscita combinato di tutte le altre porte: 1,5 A
Dati meccanici
Dimensioni: 85 * 45 * 10 mm
Peso (custodia in plastica): 33 g
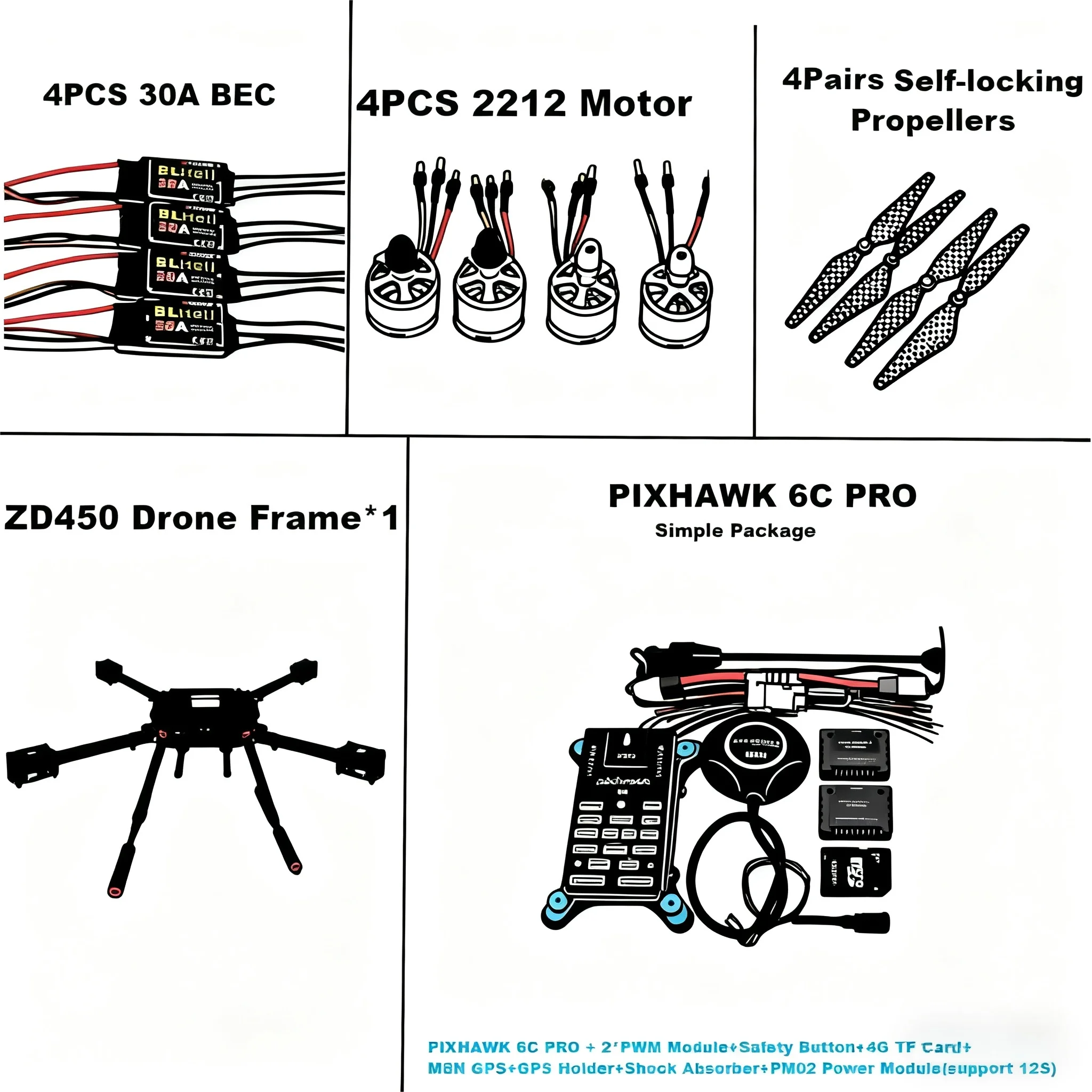
Pacchetto semplice:
F450+4 PZ BLHELI 30A +4 paia 1045 Eliche +4 PZ 2212 920KV Motore+
PIXHAWK 6C PRO +GPS M8N M9N+ Modulo di alimentazione 3DR + Supporto GPS + Ammortizzatore + Pulsante di sicurezza e 2 schede TF PWM 4G + 3 linee (4PGH1.25,6PGH1.25,2.54 pin)
Pacchetto alto:
F450+4 PZ BLHELI 30A +4 paia 1045 Eliche +4 PZ 2212 920KV Motore+
PIXHAWK 6C PRO+2*PPM+Scheda di espansione I2C+LED RGB+Schermo OLED+GPS M8N M9N+Modulo di alimentazione 3DR+ Supporto GPS+ Ammortizzatore+Scheda TF 4G+Pulsante di sicurezza + 3 linee (4PGH1.25,6PGH1.25,2.54 pin)
433MHZ/915 100MW
Il pacchetto include:
F450+4 PZ BLHELI 30A +4 paia 1045 Eliche +4 PZ 2212 920KV Motore+
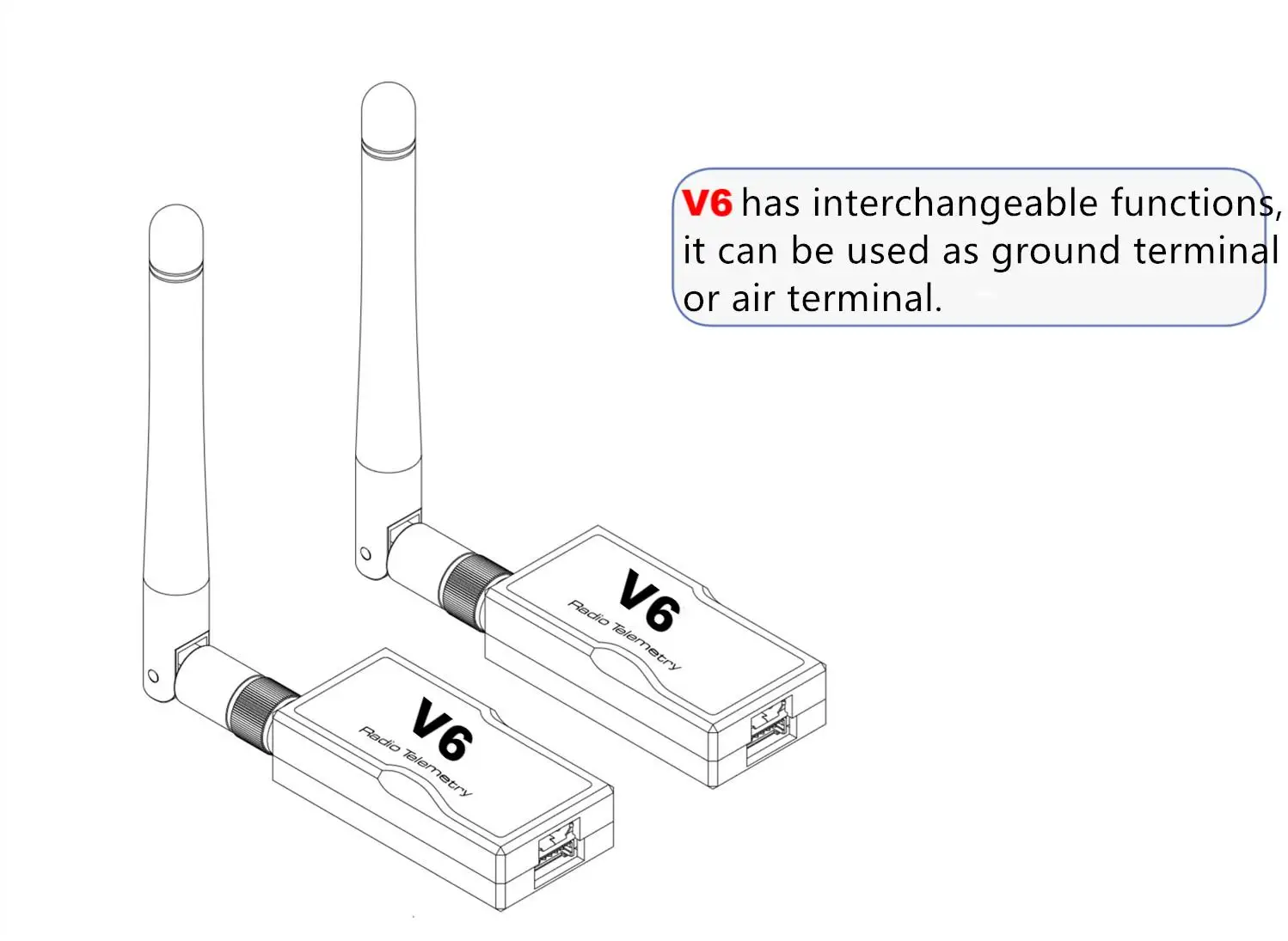
Telemetria radio 433/915MHZ 100MW V6
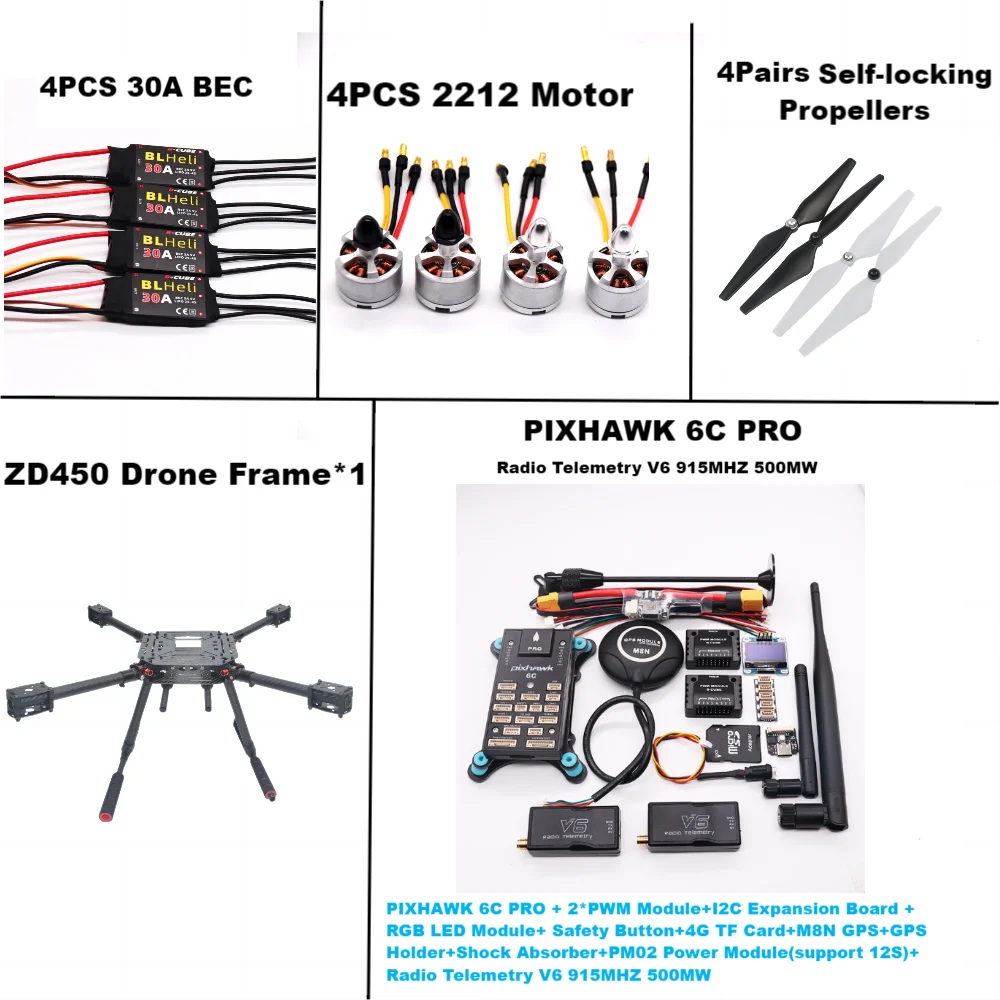
433MHZ/915 500MW
Il pacchetto include:
F450+4 PZ BLHELI 30A +4 paia 1045 Eliche +4 PZ 2212 920KV Motore+
Telemetria radio 433/915MHZ 500MW V6
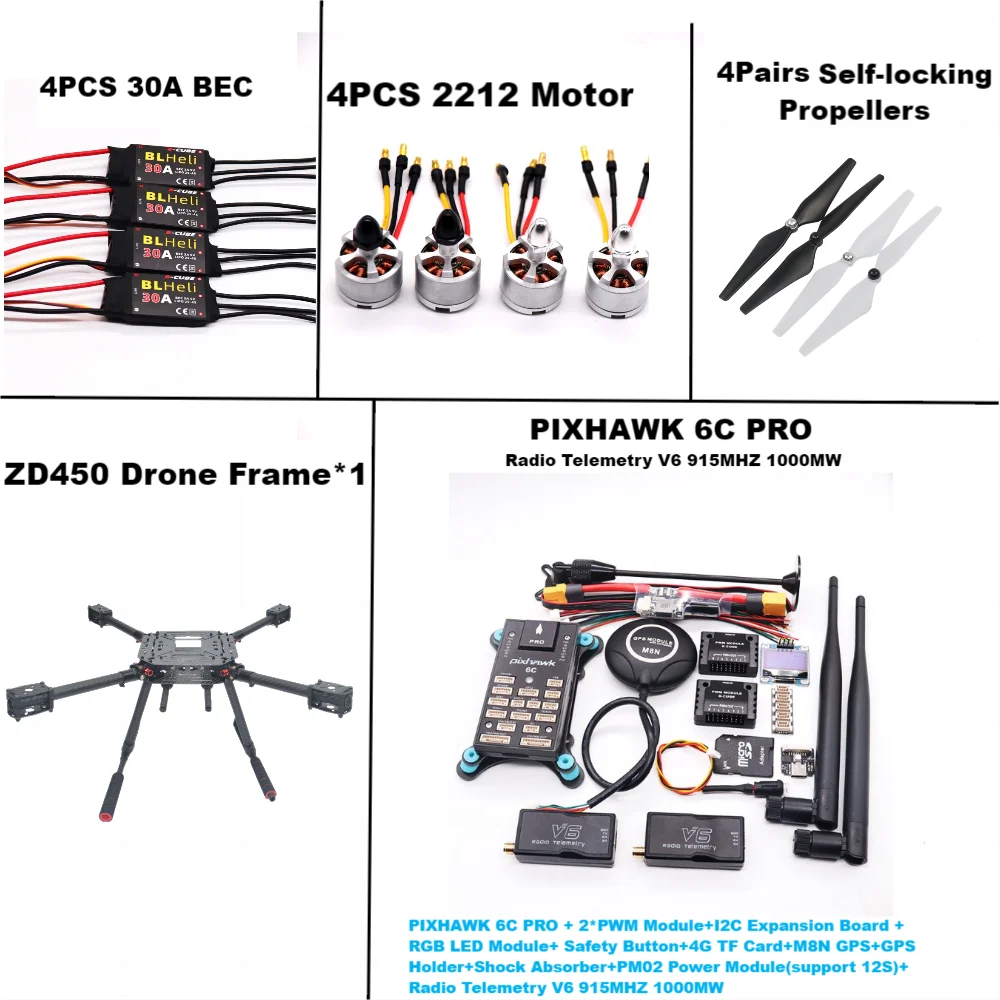
433/915MHZ 1000MW
Il pacchetto include:
F450+4 PZ BLHELI 30A +4 paia 1045 Eliche +4 PZ 2212 920KV Motore+
Telemetria radio 433/915MHZ 1000MW V6

GPS M8N:

M9N è un modulo GPS comunemente utilizzato nei veicoli aerei senza pilota, con le seguenti caratteristiche e applicazioni:
Posizionamento ad alta precisione: l’M9N adotta la tecnologia GNSS avanzata, supporta più sistemi di navigazione satellitare e può fornire informazioni sul posizionamento della posizione ad alta precisione.Per i veicoli aerei senza pilota, è possibile ottenere un posizionamento e una navigazione accurati.
Supporto multisistema: l’M9N supporta più sistemi di navigazione satellitare, inclusi GPS, GLONASS, Galileo, BeiDou, ecc.Ciò consente ai droni di ricevere più segnali satellitari contemporaneamente, migliorando la precisione e l’affidabilità del posizionamento.
Posizionamento rapido: M9N ha tempi di avvio a freddo e avvio a caldo rapidi, che possono ottenere rapidamente segnali satellitari ed eseguire il posizionamento, rendendolo fondamentale per il decollo rapido e l’esecuzione delle attività dei veicoli aerei senza pilota.
M9N può cercare più satelliti all’aperto con maggiore precisione, maggiore velocità di ricerca e migliore stabilità.(Il numero specifico di ricerche stellari è determinato dall’ambiente in quel momento.)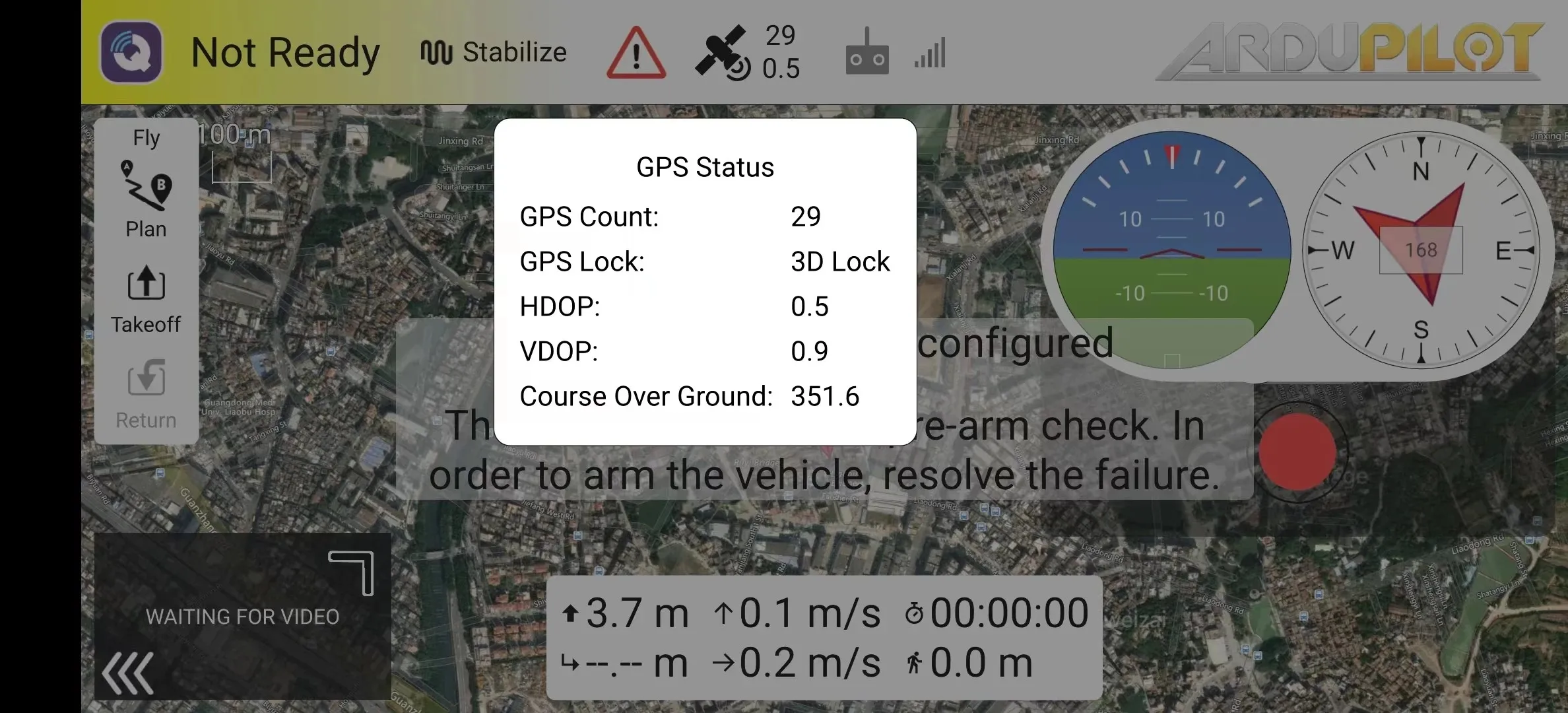


Telaio 450:




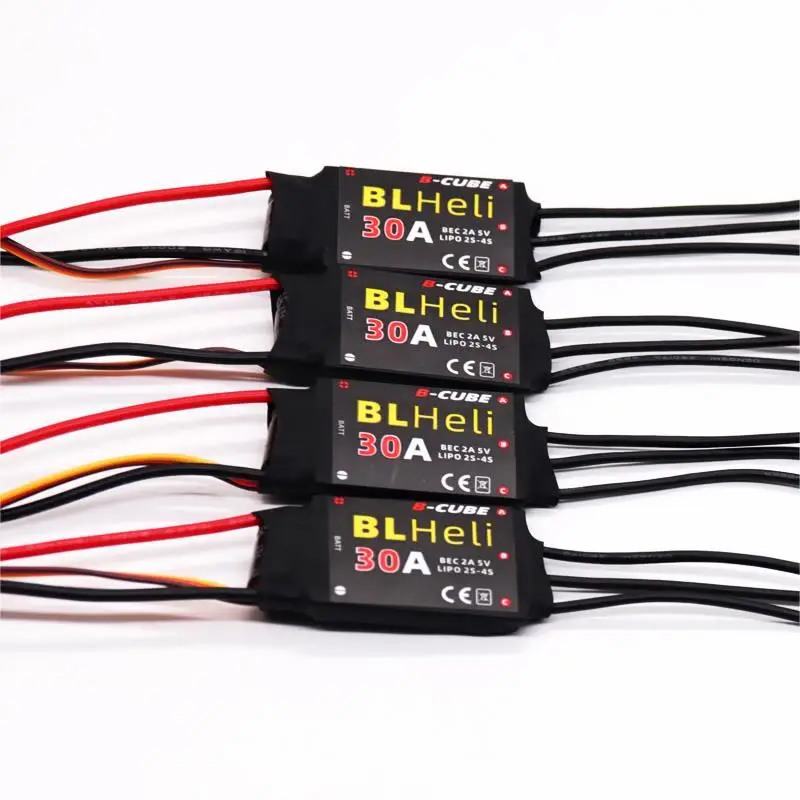
R.Caratteristiche
A1: Utilizza componenti elettronici autentici per garantire un’alta qualità e migliorare l’attuale capacità di resistenza dell’ESC.
A2: Basato sul firmware BLHeli, ottimizzato per prestazioni elevate con grande linearità e risposta dell’acceleratore molto più rapida.
A3: Progettato appositamente per multirotori e compatibile con aerei ad ala fissa ed elicotteri.
A4: Molteplici funzioni di protezione tra cui protezione da interruzione a bassa tensione/protezione da surriscaldamento/protezione da perdita di segnale dell’acceleratore.
R5: La gamma dell’acceleratore può essere configurata ed è completamente compatibile con tutti i ricevitori, fornendo una risposta dell’acceleratore fluida, lineare e precisa.R6: Tutti i parametri possono essere programmati utilizzando un trasmettitore, comprese le impostazioni predefinite.
B.Specifiche del prodotto


1045 eliche


Il modulo OLED può visualizzare alcuni messaggi.

Questo articolo spiega come collegare ESC, motori ed eliche a un pilota automatico.Il Pixhawk viene utilizzato come esempio ma altri piloti automatici sono collegati in modo simile.
Collegare i cavi di alimentazione (+), terra (-) e segnale (i) per ciascun ESC ai pin di uscita principali dei piloti automatici in base al numero del motore.Trova il tipo di telaio qui sotto per determinare l’ordine assegnato dei motori.
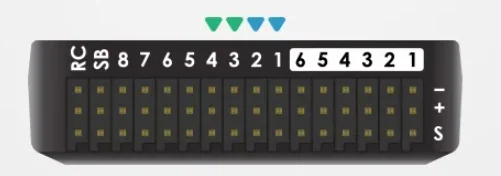
Pin di uscita Pixhawk (numerati).I primi 4 pin sono codificati a colori per collegare un Quadframe
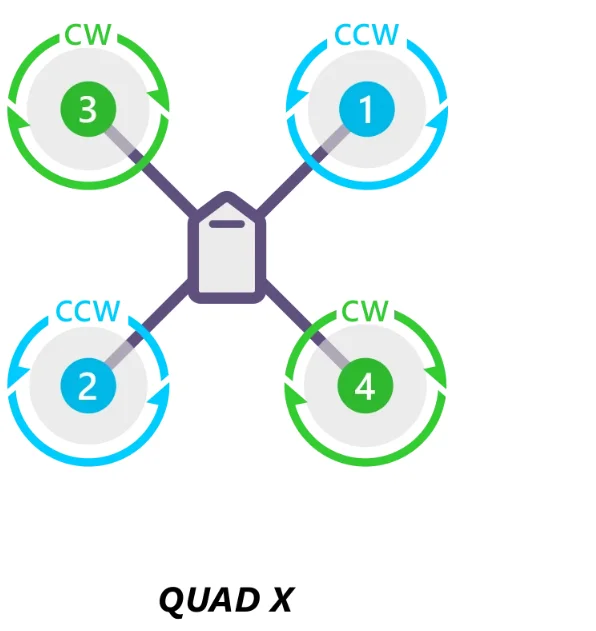
Schema dell’ordine del motore
I diagrammi seguenti mostrano l’ordine del motore per ciascun tipo di telaio.I numeri indicano quale pin di uscita del pilota automatico dovrebbe essere collegato a ciascun motore/elica.La direzione dell’elica è mostrata in verde (in senso orario, CW) o blu (in senso antiorario, CCW)  Leggenda per gli schemi dell’ordine motore
Leggenda per gli schemi dell’ordine motore
Quadricottero
Riconoscimento delle eliche in senso orario e antiorario
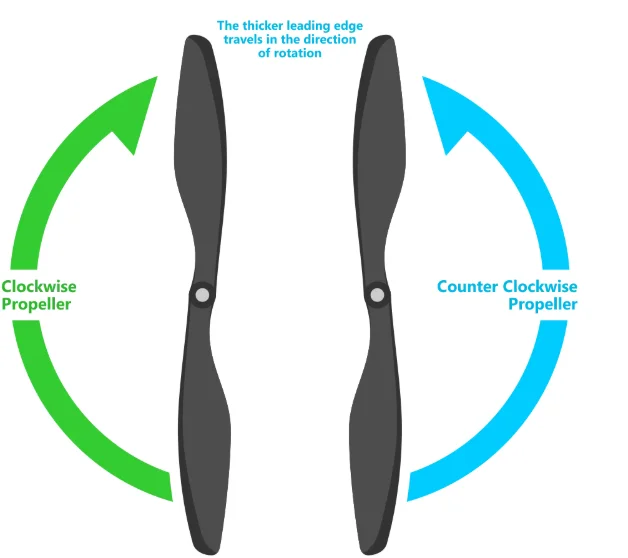
I diagrammi sopra mostrano due tipi di eliche: in senso orario (chiamati pulsanti) e antiorario (chiamati estrattori).Il più affidabile per riconoscere il tipo di elica corretto per la sua forma come mostrato di seguito.Il bordo più spesso è il bordo principale che si muove nella direzione di rotazione.Il bordo trascinante è più radicale smerlato e solitamente più sottile.
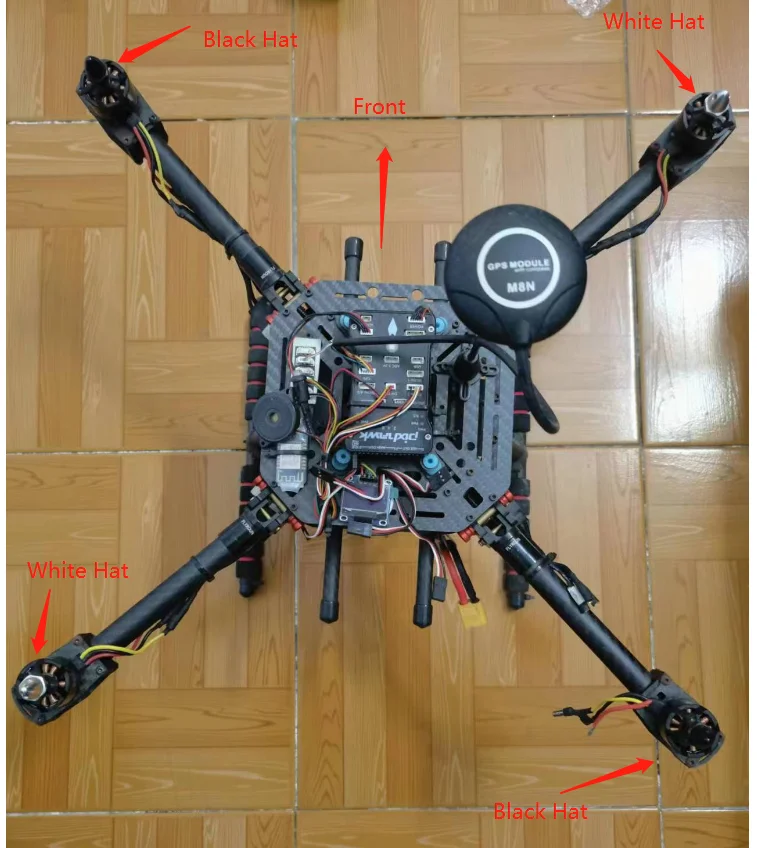
Come installare il motore?




Recensioni
Ancora non ci sono recensioni.